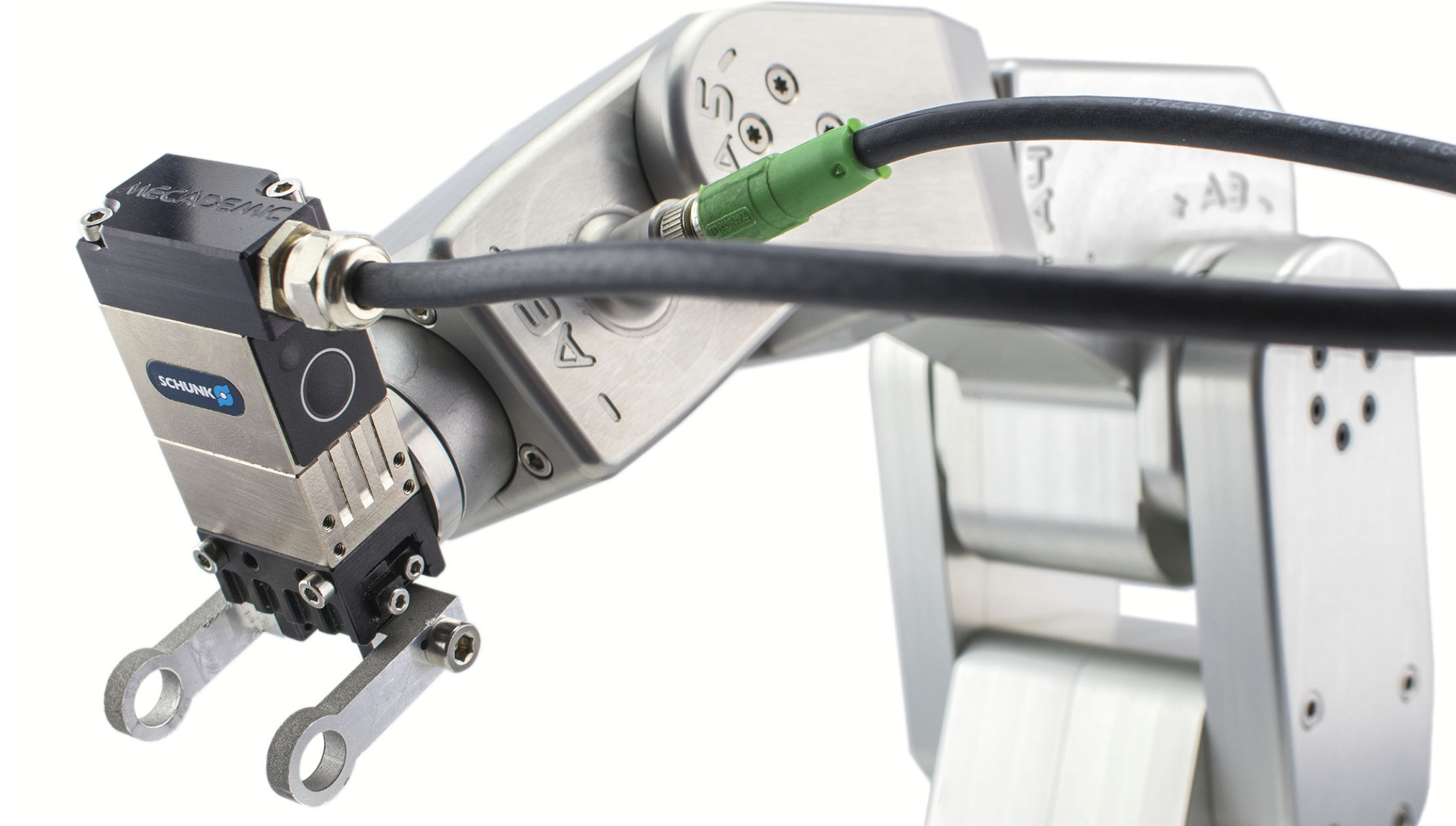
HoroSys and Mecademic offers a proprietary electric parallel gripper developed in collaboration with SCHUNK.
This miniature gripper is fully integrated with the Meca500 six-axis industrial robot and can be controlled directly within the stream of commands used to control the robot arm.
With this unique ultracompact gripper, you can not only open and close the fingers but also control their speed and the force they exert (in both internal and external grips).
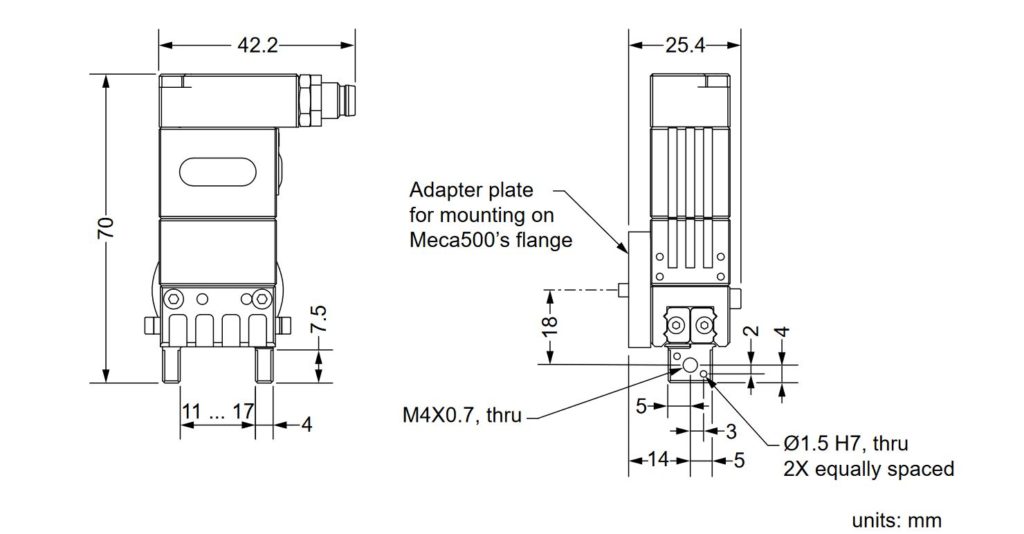
Technical data
° Stroke per jaw : 3mm
° Grip force range : -40N to 40N
° Fastest complete closing/opening time : 0.09s
° Recommended workpiece weight : 200g
Etc..
=> All data available in the gripper documentation.
Documentations
3D CAD
Accessories