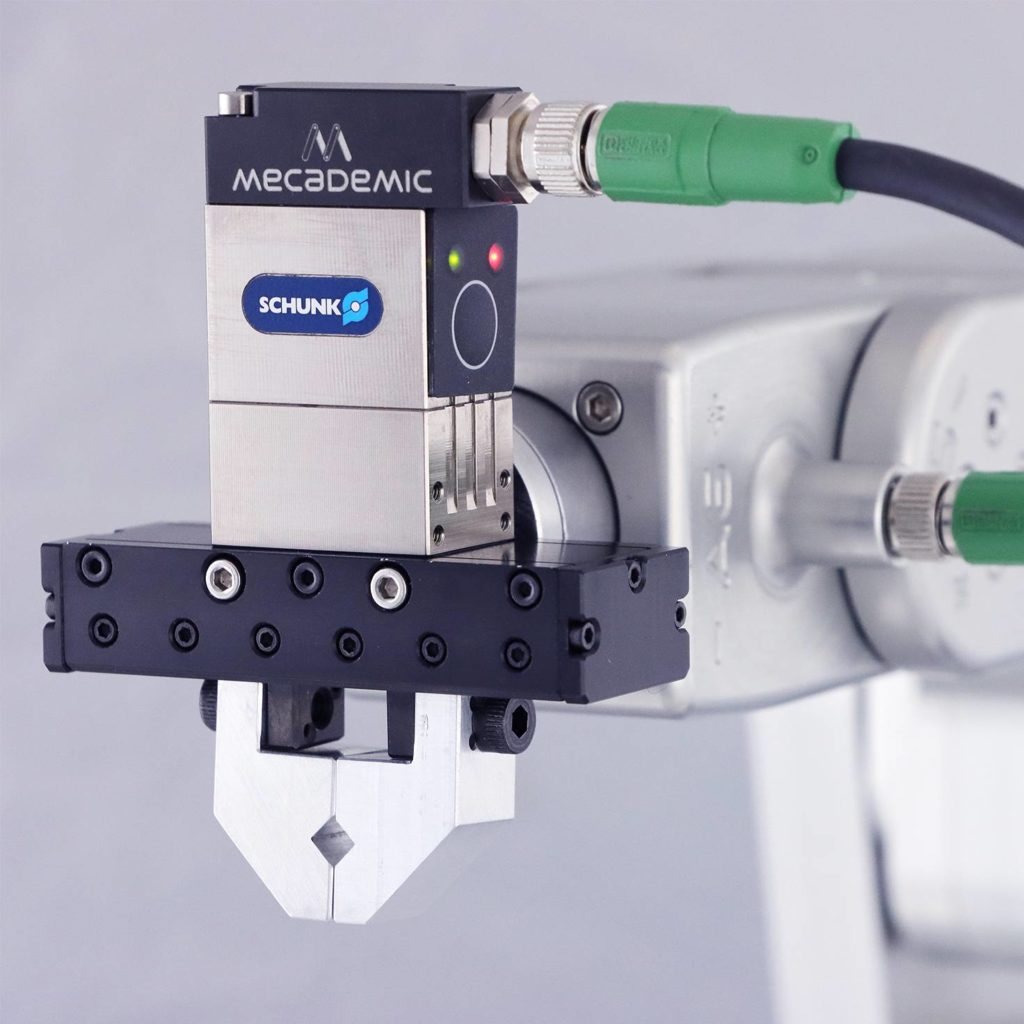
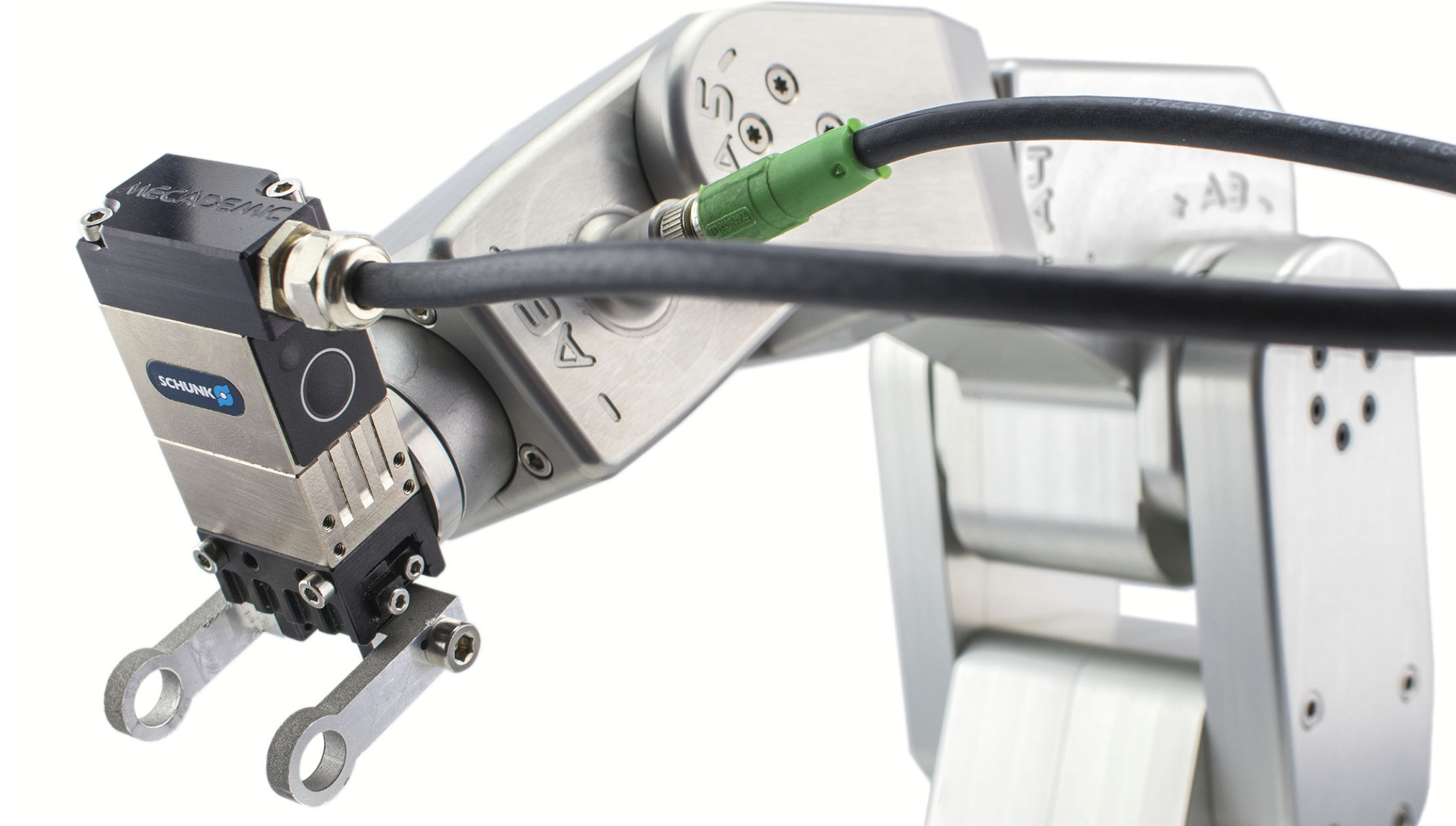
HoroSys and Mecademic offers a proprietary electric parallel gripper developed in collaboration with SCHUNK.
This miniature gripper with an extanded stroke is fully integrated with the Meca500 six-axis industrial robot and can be controlled directly within the stream of commands used to control the robot arm.
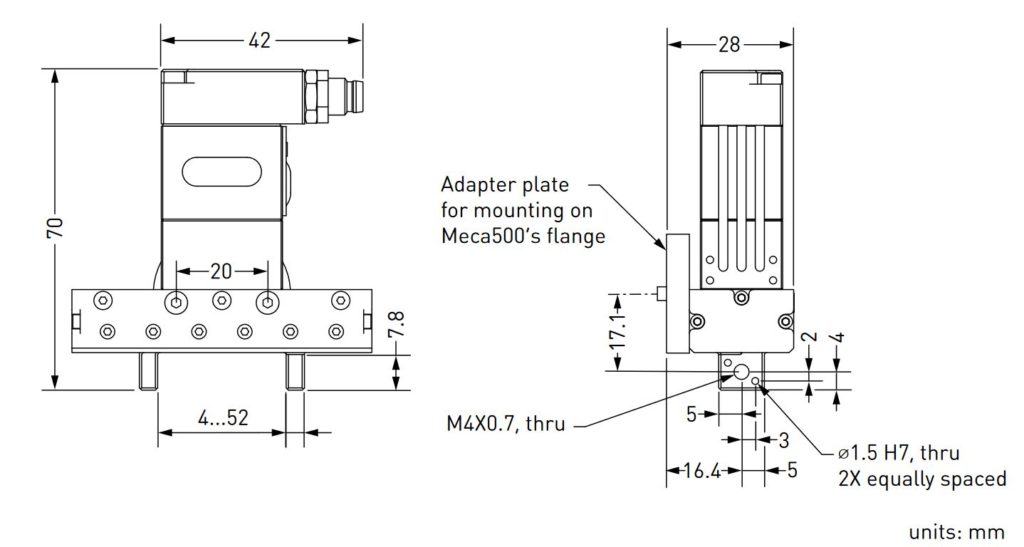
In addition to using integrated open and close commands, you can specify the distance between the fingers and adjust the force and velocity of the grip. The electric gripper is supplied with an adapter plate.
Technical data
° Stroke per jaw : 24mm
° Grip force range : -40N to 40N
°
Repeat accuracy : 0.03mm
° Recommended workpiece weight : 200g
Etc..
=> All data available in the robot documentation.
Documentations
3D CAD