Le projet « Smart Micro Factory »
Ce projet a démarré sur le fond de 2 questions essentielles :
– Comment donner accès à l’automatisation et à la robotique aux PME qui produisent en faibles volumes, avec des moyens d’investissements limités, nécessitant un amortissement rapide ?
– Comment leurs apporter des solutions flexibles et reconfigurables, adaptées à leurs besoins spécifiques ?
Pour y répondre :
– La création d’un pool de compétences SMF. Industriels, PME, Académie et Etat, ensemble pour réussir.

L’objectif
Créer les modules et outils logiciels nécessaires à la réalisation de micro-usines flexibles.
Le projet consiste à réaliser 2 lignes pilotes évolutives « Smart Micro Factory », correspondant aux besoins de partenaires industriels, avec des processus d’assemblage typiques de l’industrie microtechnique locale.
Pour lier un processus à un autre, le premier module à étudier et à réaliser est une station de manipulation, qui doit permettre soit de charger / décharger des composants, soit de réaliser des manipulations complexes.

La robotique dans la microtechnique
L’implantation de la robotique se fait difficilement : trop grand, trop complexe et trop cher pour le marché de la microtechnique. Pourtant, il y a un réel besoin d’automatiser des tâches.
En 2015, 264’000 robots ont été implanté dans le monde. 400’000 sont prévus pour 2018. En Suisse, env. 1000 unités robotiques vendues en 2015… 33’000 au Japon.
HoroSys veut devenir le premier partenaire privilégié des PME à la recherche de solutions accessibles pour des technologies « Desktop Factory & Smart Industry 4.0», ainsi que le premier intégrateur de robot ayant les caractéristiques adaptés (précision, coût abordable, petite taille, etc.) pour le marché microtechnique Suisse.
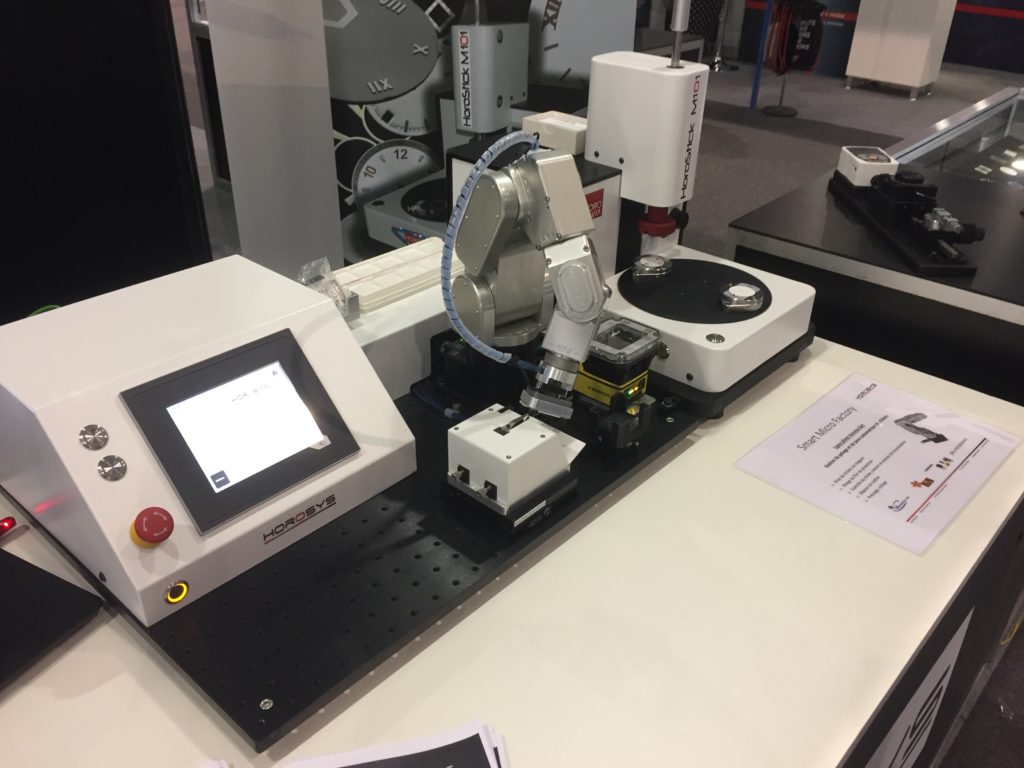
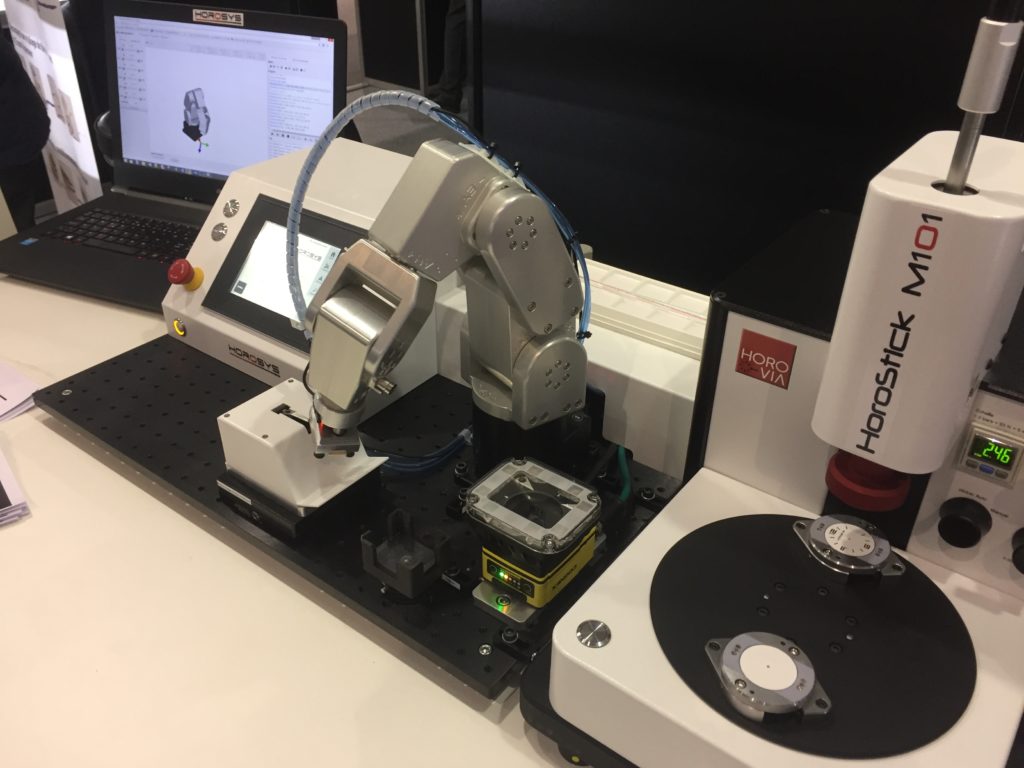
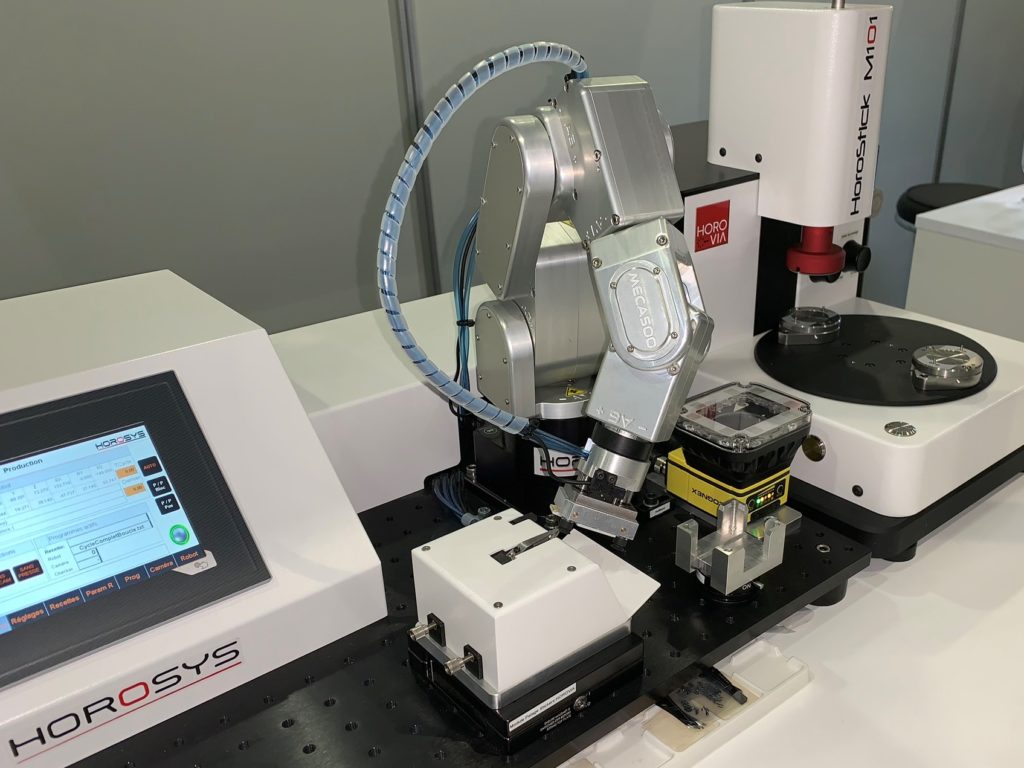
Ligne pilote d’assemblage microtechnique

Cette première ligne SMF permet de réaliser des opérations d’assemblage par chassage et par rivetage, soit manuellement, soit avec l’aide d’un robot de manière entièrement automatique. Les composants de test sont caractéristiques des assemblages horlogers. Un contrôle de métrologie automatique est également intégré sur les composants réalisés.
Les contraintes clés ont été :
– Précision de manipulation 0.005mm, aucune marque permise, précision d’assemblage <0.01mm.
– Simplicité d’utilisation, changements de série très rapides et fréquents.
– Conception modulaire, permettant l’utilisation manuelle ou semi-automatique pour les petites séries.
-Interconnexion entre les modules par Ethernet, pilotage et gestion des recettes décentralisés.
Ligne pilote de manipulation complexe de décalque :
Cette deuxième ligne SMF permet la dépose d’appliques collées (stickers) sur des cadrans de montres. La station robotique permet de réaliser une opération de manipulation complexe du sticker (pelage du film de protection) et permet la dépose sur cadrans directement sur la presse « client ».
Les contraintes clés :
– Manipulation et mouvements complexes (pelage de sticker) et délicat à automatiser avec des stickers souples.
– Changements de séries très fréquents, nombreux design différents.
– S’adapter à une presse à table tournante, permettant le travail en temps masqué.
– La précision de dépose du sticker sur cadran <0.05mm.
Cette ligne présente l’avantage d‘utiliser les deux points forts des stations robotiques proposées : mouvement complexe sur 6 axes synchronisés + précision. Dans le cadre de la préparation du projet SMF, un premier démonstrateur a été réalisé afin de valider le processus de pelage et la dépose assistée par vision, pour un type de sticker.

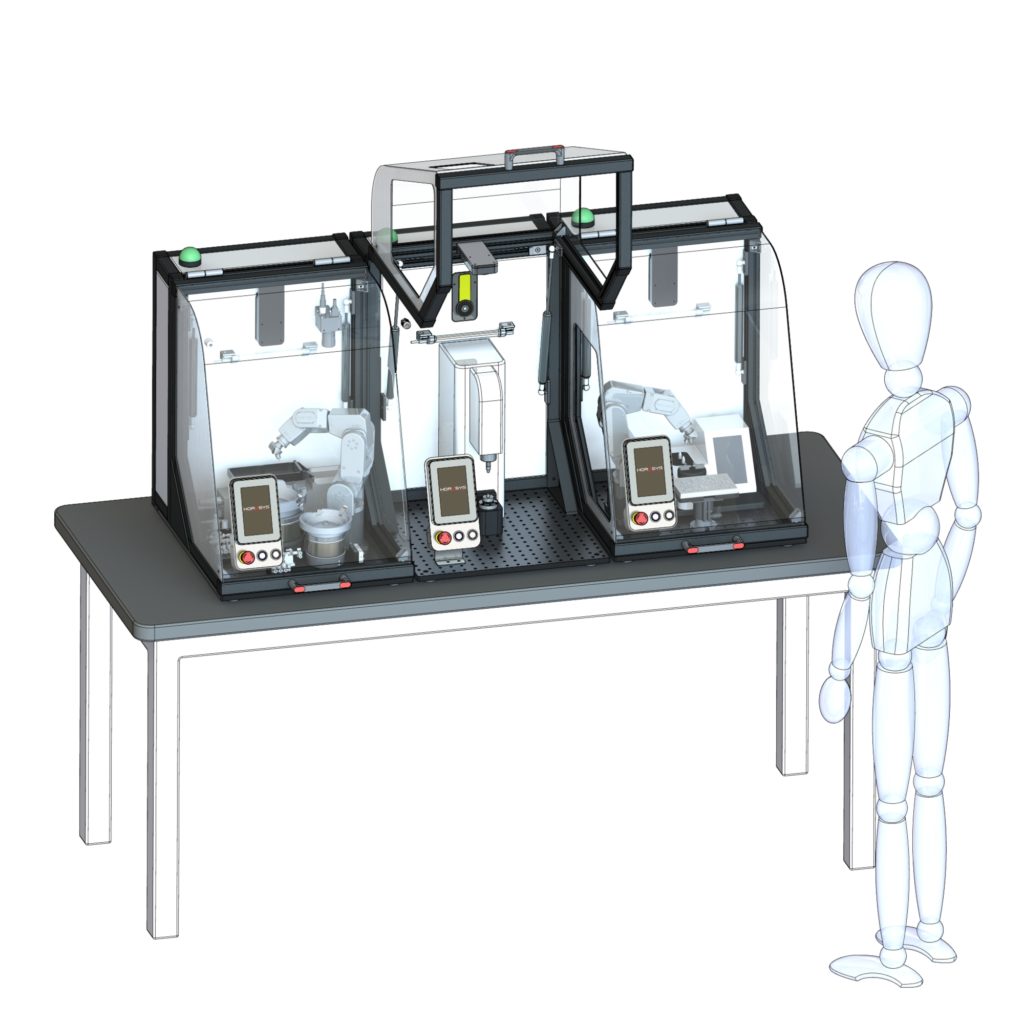
Aboutissement du projet – Station SMF
La création des « Stations SMF / Robotique de table » marque l’aboutissement de ce projet, nous avons réuni tout les points clefs issus du projet SMF et nous les avons intégré dans de petites stations modulables et compactes.